Mars Reconnaissance Orbiter

 | |
| Tipul misiunii | Orbitor Marte |
|---|---|
| Operator | NASA / JPL |
| COSPAR ID | 2005-029A |
| Nr. SATCAT | 28788 |
| Website | marsprogram.jpl.nasa.gov/mro/ nasa.gov/mission pages/MRO/main/index.html |
| Durata misiunii | Misiune principală: 2 ani Au trecut: 18 ani, 8 luni și 2 zile de la lansare 18 ani, 1 lună și 4 zile (6433 soli) pe Marte |
| Proprietățile navei spațiale | |
| Producător | Lockheed Martin / University of Arizona / APL / ASI / Malin Space Science Systems |
| Masă de lansare | 2.180 kg |
| Masă uscată | 1.031 kg |
| Masă utilă | 139 kg |
| Putere | 2.000 wați |
| Începutul misiunii | |
| Dată lansare | 12 august 2005, 11:43:00 UTC |
| Lansator | Atlas V 401 |
| Loc lansare | Cape Canaveral SLC-41 |
| Contractor | ILS |
| Parametri orbitali | |
| Sistem de referință | Areocentrică |
| Regim | Orbită heliosincronă[1] |
| Înclinație | 93 grade[1] |
| Orbitator Marte | |
| Intrare orbită | 10 martie 2006, 21:24:00 UTC |
 Însemne oficiale ale misiunii Mars Reconnaissance Orbiter | |
Mars Reconnaissance Orbiter (MRO) este o navă spațială a NASA proiectată pentru a efectua explorarea planetei Marte de pe orbită.
Când MRO a intrat pe orbită, Marte era orbitată sau explorată de alte cinci sonde și sateliți: Mars Global Surveyor, Mars Express, Mars Odyssey, și două rovere; pe atunci un record al numărului de sonde aflate în apropierea lui Marte. Nava a costat 720 de milioane de dolari și a fost construită de Lockheed Martin sub supravegherea Jet Propulsion Laboratory. Ea a fost lansată la 12 august 2005 și a atins orbita marțiană la 10 martie 2006. În noiembrie 2006, la cinci luni după intrarea în atmosferă, a intrat în orbita sa finală și a și-a început activitatea științifică.
MRO conține o serie de instrumente științifice cum ar fi camere foto, spectrometre și un aparat radar, utilizate pentru a analiza formele de relief, stratigrafia, mineralele și gheața de pe Marte. Ea deschide drumul altor nave spațiale și monitorizării condițiilor meteorologice și de suprafață, studiind locurile posibile de amartizare și susținând un nou sistem de telecomunicații. Sistemul de comunicații MRO transmite mai multe date spre Pământ decât toate celelalte misiuni interplanetare la un loc și urmează să servească drept satelit de transmisie pentru viitoarele misiuni.[2]
Înainte de lansare[modificare | modificare sursă]
A fost una dintre cele două misiuni luate în calcul pentru fereastra de lansare marțiană din 2003; în timpul procesului de propunere, însă, orbiterul a pierdut împotriva a ceea ce avea să fie cunoscut sub numele de Mars Exploration Rovers. Misiunea orbiterului a fost reprogramată pentru lansare în 2005,[3] iar NASA a anunțat numele său final, Mars Reconnaissance Orbiter, la 26 octombrie 2000.[4]
MRO este modelat după Mars Global Surveyor, sonda realizată de NASA pentru a efectua supravegherea planetei Marte de pe orbită. Primele specificații includeau o cameră mare pentru fotografii de înaltă rezoluție ale planetei. În acest sens, Jim Garvin, omul de știință ales de NASA pentru programul explorării planetei Marte, a declarat că MRO avea să fie un „microscop pe orbită”.[5] Satelitul avea să includă și un spectrograf pentru lumină vizibilă apropiată de infraroșu.
La 3 octombrie 2001, NASA a ales compania Lockheed Martin ca principal contractant al fabricației navei spațiale.[6] Până la finalul lui 2001, toate instrumentele misiunii fuseseră alese. Nu au fost probleme majore pe parcursul construcției MRO, și nava a fost mutată la John F. Kennedy Space Center în ziua de 1 mai 2005 pentru a fi pregătită de lansare.[7]
Obiectivele misiunii[modificare | modificare sursă]

Operațiunile științifice ale MRO aveau să dureze doi ani pământeni, între noiembrie 2006 și noiembrie 2008. Unul dintre principalele scopuri ale misiunii a fost cel de a cartografia suprafața marțiană cu camerele sale de înaltă rezoluție pentru a alege locurile de amartizare ale viitoarelor misiuni de suprafață. MRO a jucat un rol important în alegerea locului de amartizare al misiunii Phoenix Mars Lander, care a explorat zonele arctice marțiene din Green Valley.[8] Locul ales inițial a fost fotografiat cu camera HiRISE și s-a descoperit că este bolovănos. După analiza cu HiRISE și cu THEMIS al sondei Mars Odyssey s-a ales un nou loc. Locul amartizării Mars Science Laboratory, un rover foarte manevrabil, va fi și el analizat. MRO furnizează și date critice de navigație în timpul amartizărilor și funcționează ca releu de telecomunicații.
MRO utilizează echipamentul științific de la bord pentru studierea climei, vremii și atmosferei de pe Marte și caută semne de apă în calotele polare și în subsol. MRO caută, de asemenea, resturile navelor spațiale pierdute Mars Polar Lander și Beagle 2,[9] După terminarea misiunii științifice, sonda și-a continuat activitatea de sistem de navigație și de comunicații pentru sondele de tip rover și lander.[10]
Lansarea și intrarea în orbită[modificare | modificare sursă]

La 12 august 2005, MRO a fost lansat pe o rachetă Atlas V-401[11] de la Complexul de Lansări Spațiale 41 de la Baza Aeriană de la Cape Canaveral. Treapta superioară a rachetei și-a încheiat arderea într-o perioadă de cincizeci și șase de minute și a pus MRO pe orbită de transfer interplanetar către Marte.[12]
MRO a călătorit prin spațiul interplanetar timp de șapte luni și jumătate înainte de a ajunge pe Marte. Pe drum, au fost testate și calibrate majoritatea experimentelor și instrumentelor științifice. Pentru a asigura o intrare pe orbită corectă, au fost planificate patru manevre de corectarea traiectoriei și s-a discutat o a cincea manevră pentru situații de urgență.[13] Au fost necesare, însă, doar trei manevre de corectarea traiectoriei, combustibilul economisit fiind util pentru prelungirea misiunii MRO.[14]
MRO și-a început intrarea în orbită apropiindu-se de Marte la 10 martie 2006, trecând peste emisfera de sud a planetei la o altitudine de 370–400 km. Toate cele șase motoare principale ale MRO au funcționat timp de 27 de minute pentru a încetini sinda de la ~2.900 m/s la ~1.900 m/s. Vaporul cu heliu sub presiune a fost mai rece decât se aștepta, ceea ce a redus presiunea din rezervorul de combustibil cu aproximativ 21 kPa. Reducerea de presiune a cauzat scăderea cu 2% a puterii motorului, dar MRO a compensat automat extinzând timpul de ardere cu 33 de secunde.[15]

În final, sonda a intrat pe o orbită polară foarte eliptică cu o perioadă de aproximativ 35,5 ore.[16] La scurt timp după intrare, periapsa – punctul de pe orbită cel mai aproape de Marte – a fost de 3.806 km de centrul planetei (426 km de suprafață). Apoapsa – punctul de pe orbită cel mai îndepărtat de Marte – a fost la 47.972 km de centrul planetei (44.500 km de la suprafață).
La 30 martie 2006, MRO a început procesul de frânare, o procedură în trei pași care reduce la jumătate combustibilul necesar pentru a atinge o orbită mai joasă, circulară și cu o perioadă mai scurtă. Mai întâi, pe parcursul primelor cinci ocoluri ale planetei (care au durat o săptămână pe Pământ), MRO și-a folosit motoarele pentru a coborî periapsa orbitei la o altitudine mai joasă. Această altitudine depinde de densitatea atmosferei deoarece densitatea atmosferei marțiene se modifică sezonier. În al doilea pas, în timp ce efectua corecții minore ale altitudinii periapsei cu ajutorul motoarelor, MRO a a menținut altitudinea de frânare timp de 445 de orbite planetare (aproximativ 5 săptămâni de pe Pământ) pentru a reduce apoapsa orbitei la 450 km. Aceasta s-a efectuat în așa fel încât să nu se încălzească nava spațială prea mult, dar să și intre în atmosferă suficient pentru a încetini. După terminarea acestui proces, MRO și-a folosit motoarele pentru a-și mișca periapsa în afara atmosferei marțiene, la 30 august 2006.[17][18]
În septembrie 2006, MRO și-a mai pornit motoarele de două ori pentru a face un acord fin al orbitei sale finale, aproape circulare, aflate la o altitudine de 250–316 km deasupra suprafeței marțiene.[19] Antenele dipolare SHARAD au fost desfăcute la 16 septembrie. Toate instrumentele științifice au fost testate și majoritatea erau oprite înainte de conjuncția solară ce a avut loc între 7 octombrie și 6 noiembrie 2006. După sfârșitul conjuncției, a început „prima fază științifică”.
La 17 noiembrie 2006, NASA a anunțat reușita testului MRO ca releu orbital de comunicații. Utilizând roverul NASA „Spirit” ca punct de origine al transmisiei, MRO a acționat ca releu de transmisie a datelor către Pământ.
Eveimente și descoperiri[modificare | modificare sursă]

La 29 septembrie 2006, MRO a realizat prima imagine de înaltă rezoluție de pe orbita sa științifică. Această imagine are o rezoluție suficientă pentru a separa puncte de 90 cm în diametru.
La 6 octombrie 2006, NASA a publicat fotografii detaliate ale craterului Victoria împreună cu roverul Opportunity aflat pe marginea acestuia.[20]
În noiembrie 2006, au început să apară probleme de funcționare la două dintre instrumentele MRO. În interiorul Mars Climate Sounder (MCS), un mecanism de tact a funcționat greșit de mai multe ori, cauzând deplasarea câmpului vizual. Până în decembrie, s-au suspendat operațiunile normale ale acestui instrument, deși o strategie de rezervă permite acestuia să efectueze majoritatea observațiilor pentru care a fost construit.[21] O creștere a zgomotului și a numărului de pixeli eronați a fost observată la câțiva senzori CCD ai camerei High Resolution Imaging Science Experiment (HiRISE). Operarea acestei camere cu un timp de încălzire mai mare a ameliorat această problemă.[22]
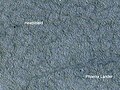
HiRISE a continuat să transmită imagini ce au permis descoperiri legate de geologia marțiană. Cea mai de seamă dintre acestea este anunțul observării unor caracteristici ale terenului care indică prezența și acțiunea dioxidului de carbon lichid sau a apei la suprafață planetei Marte în trecutul geologic recent. HiRISE a reușit să fotografieze landerul Phoenix în timpul coborîrii parașutate spre Vastitas Borealis la 25 mai 2008.
Instrumente[modificare | modificare sursă]
Pe orbiter sunt incluse trei camere, două spectrometre și un radar împreună cu două „instrumente științifice”, care utilizează date de la alte subsisteme pentru culegerea de date științifice. Trei experimente tehnologice au testat echipamente pentru misiunile viitoare.[23] It is expected MRO will obtain about 5,000 images a year.[24]
Camera HiRISE[modificare | modificare sursă]

Camera High Resolution Imaging Science Experiment este un telescop cu reflexie de 0,5 m reflecting telescope, cel mai mare purtat într-o misiune în spațiul îndepărtat, și are o rezoluție unghiulară de 1 microradian (μrad), sau 0,3 m de la o altitudine de 300 km. Prin comparație, imaginile din satelit ale Pământului sunt în general disponibile la o rezoluție de 0,5 m, iar imaginile din satelit de la Google Maps sunt disponibile la 1 m.[25] HiRISE realizează imagini în trei benzi de culoare, 400–600 nm (albastru-verde sau B-G), 550–850 nm (roșu) și 800–1.000 nm (infraroșul apropiat sau NIR).[26]

Imaginile în culoare roșie au 20.264 pixeli lățime (6 km), iar cele B-G și NIR sunt de 4.048 pixeli (1,2 km). Dimensiunea fișierelor imagine este limitată doar de capacitatea de memorie a calculatorului, de 28 gigabiți, și dimensiunea nominală maximă este de 20.000 × 40.000 de pixeli (800 megapixeli) pentru roșu și 4.000 × 40.000 pixels (160 megapixeli) pentru B-G și NIR. Fiecare imagine de 16,4 Gb este comprimată la 5 Gb înainte de transmisie și de publicarea pe site-ul web HiRISE în format JPEG 2000.[27][28] Pentru a facilitata cartografierea punctelor de amartizare potențiale, HiRISE poate produce perechi stereoscopice de imagini din care se pot extrage informații despre topografia locurilor cu o precizie de 0,25 m.[29] HiRISE a fost construit de Ball Aerospace & Technologies Corp.
Camera CTX[modificare | modificare sursă]
Camera Context (CTX) furnizează imagini în tente de gri (alb-negru, 500–800 nm) cu o rezoluție de 1 pixel la 6 m. CTX este proiectat pentru a oferi hărți contextuale ale observațiilor mai detaliate efectuated de HiRISE și CRISM. Optica CTX constă dintr-un telescop Maksutov Cassegrain cu distanță focală de 350 mm și un senzor CCD cu o lățime de 5.064 pixeli similar cu cel al instrumentului HiRISE. Instrumentul face fotografii de 30 km lățime și are memorie internă suficientă pentru a stoca o imagine cu o lungime de 160 km înainte de a o transfera în calculatorul principal.[30]
Camera MARCI[modificare | modificare sursă]

Mars Color Imager (MARCI) este o cameră cu unghi larg și rezoluție joasă care vede suprafața planetei Marte în cinci benzi visibile și două ultraviolete. în fiecare zi, MARCI face aproximativ 84 de fotografii și produce o hartă globală cu o rezoluție de 1–10 km pe pixel. Această hartă este folosită pentru a calcula rapoarte meteorologice zilnice de pe Marte, pentru a caracteriza variațiile anuale și sezoniere ale vremii, și cartografiază prezența vaporilor de apă și a ozonului în atmosferă.[31]
Spectrometrul CRISM[modificare | modificare sursă]

Instrumentul „Compact Reconnaissance Imaging Spectrometer for Mars” (CRISM) este un spectrometru pentru lumină vizibilă și în infraroșul apropiat (VNIR) utilizat pentru a produce hărți mineralogice detaliate ale suprafeței marțiene. El funcționează de la 370 la 3920 nm, măsoară spectrul în 544 canale (fiecare cu o lățime de bandă de 6.55 nm), și are o rezoluție de 18 m la o altitudine de 300 km. CRISM este utilizat pentru a identifica mineralele și substanțele chimice ce pot oferi indicii despre existența în prezent sau în trecut a apei la suprafața planetei. Printre aceste materiale se numără fierul, oxizii, filosilicatele și carburile, care au șabloane caracteristice ale spectrului.[32]
Spectrometrul MCS[modificare | modificare sursă]
„Mars Climate Sounder” (MCS) este un spectrometru cu un canal vizibil/infraroșul apropiat (0,3–3,0 μm) și opt canale în infraroșul îndepărtat (12–50 μm). Aceste canale au fost alese pentru a măsura temperatura, presiunea, vaporii de apă și cantitatea de praf. MCS observă atmosfera de la orizontul planetei Marte (așa cum este el văzut din punctul de vedere al MRO) descompunându-l în felii verticale și efectuând măsurători pe fiecare felie în incremente de 5 km. Aceste măsurători sunt apoi asamblate în hărți meteorologice zilnice globale pentru a arăta variabilele principale ale vremii marțiene: temperatura, presiunea, umiditatea și densitatea prafului.[33]
Radarul SHARAD[modificare | modificare sursă]

Experimentul Shallow Subsurface Radar (SHARAD) este proiectat pentru a extrage date din structura internă a calotelor polare marțiene. El adună și informații globale cu privire la straturile de gheață, piatră și posibil apă lichidă de sub suprafață și care ar putea accesibile. SHARAD utilizează unde radio de înaltă frecvență, între 15 și 25 MHz, gamă ce îi permite să observe straturi cu o grosime de cel puțin 7 m până la o adâncime maximă de 1 km. Rezoluția orizontală este de 0,3–3 km.[34] SHARAD este proiectat pentru a opera în conjuncție cu Mars Express's MARSIS, care are rezoluție mai joasă, dar pătrunde mult mai adânc. Atât SHARAD cât și MARSIS au fost construite de Agenția Spațială Italiană.[35]
Instrumente inginerești[modificare | modificare sursă]
Pe lângă echipamentul de realizare a imaginilor, MRO poartă mai multe instrumente inginerești. Pachetul pentru Investigarea Câmpului Gravitațional măsoară variații ale câmpului gravitațional marțian prin variațiile de viteză ale navei. Modificările vitezei sunt detectate prin măsurarea deplasării Doppler a semnalelor radio recepționate de pe Pământ. Pachetul include și accelerometre sensibile utilizate pentru a deduce in situ densitatea atmosferei de pe Marte în timpul frânării.[36]
Electra este un radio UHF definit prin software și utilizat pentru a comunica cu alte nave care se apropie, amartizează, sau operează pe Marte. Pe lângă legăturile de date controlate de protocoale între nave de la 1 kbit/s până la 2 Mbit/s, Electra furnizează strângere de date Doppler, înregistrare în buclă deschisă și un serviciu de oră foarte precis bazat pe un oscilator ultrastabil 5e-13. Informațiile Doppler pentru vehiculele care se apropie pot fi utilizate pentru țintirea coborârii finale sau pentru recrearea traiectoriei de coborâre și amartizare. Informațiile Doppler despre vehiculele amartizate vor permite oamenilor de știință să determine cu exactitate poziția landerelor și roverelor pe suprafața marțiană. Cele două nave MER aflate acum pe Marte utilizează un releu radio UHF de generație anterioară, care furnizează funcționalități similare prin orbiterul Mars Odyssey. Radioul Electra a utilizat nava MER pentru a-și demonstra funcționalitatea, dar nu a furnizat servicii de retransmisie decât după sosirea în 2008 a lui landerului Phoenix. Întrucât radioul Electra este definit prin software până la nivel de modem, se pot adăuga noi funcții de modulare, codificare și protocol în timp ce nava MRO se află pe orbita marțiană.[37]
Optical Navigation Camera fotografiază sateliții planetei Marte, Phobos și Deimos, pe fundalul cerului înstelat pentru a determina orbita MRO. Deși fotografiile sateliților nu reprezintă o componentă critică a misiunii, ele au fost incluse ca test tehnologic pentru viitoarele misiuni orbitale sau cu amartizare.[38] Optical Navigation Camera a fost testată cu succes în lunile februarie și martie 2006.[39]
Date inginerești[modificare | modificare sursă]

Structura[modificare | modificare sursă]
Lucrătorii de la Lockheed Martin Space Systems din Denver au asamblat structura navei și au atașat instrumentele. Instrumentele au fost construite la Jet Propulsion Laboratory, Laboratorul Lunar și Planetar al Universității Arizona din Tucson, Laboratorul de Fizică Aplicată al Universității Johns Hopkins din Laurel, Maryland, Agenția Spațială Italiană de la Roma și Malin Space Science Systems din San Diego, California.[40] Costul total al navei a fost de 720 de milioane de dolari americani.[41]
Structura este realizată în mare parte din compuși carbonici și cu structură de faguri din aluminiu. Rezervorul de combustibil din titan ocupă mare parte din volumul și masa navei și furnizează mare parte din integritatea sa structurală. Masa totală a navei este de mai puțin de 2.180 kg iar masa fără combustibil este mai mică de 1.031 kg.[42]
Sistemele de alimentare cu energie[modificare | modificare sursă]

MRO extrage toată energia electrică din două panouri solare, fiecare capabil de a se mișca independent pe două axe (sus-jos și stânga-dreapta). Fiecare panou solar măsoară 5,35 × 2,53 m și are o suprafață de 9,5 m2 acoperită cu 3744 de celule fotovoltaice. Celulele solare de mare eficiență cu triplă joncțiune pot converti peste 26% din energia solară direct în energie electrică și sunt legate împreună pentru a menține o tensiune electromotoare de 32 volți. Pe Marte, cele două panouri solare produc energie cu o putere de 1.000 wați; în contrast, aceste panouri ar produce 3000 wați pe o orbită comparabilă în jurul Pământului, întrucât acesta este mai aproape de Soare.[43]
MRO are două baterii reîncărcabile cu hidrură de nichel utilizată pentru alimentarea navei atunci când nu este cu fața la soare. Fiecare baterie are o capacitate de stocare de 50 amperi-oră (180 kC). Nu se pot folosi toată capacitatea de stocare a bateriilor din cauza constrângerilor de tensiune, dar ele permit extinderea vieții bateriei—capabilitate valoroasă, dat fiind că pierderea în timp a capacității bateriilor este una dintre cele mai comune cauze ale defectării sateliților. S-a anticipat ca doar 40% din capabilitățile bateriilor să fie necesare pe durata de viață a navei.[43]
Sistemele electronice[modificare | modificare sursă]
Calculatorul principal al MRO este un procesor RAD750 pe 32 de biți, cu o frecvență de 133 MHz, 10,4 milioane de tranzistoare. Acest procesor este o versiune rezistentă la radiații a unor procesoare PowerPC 750 sau G3 cu o placă de bază special construită. RAD750 este un succesor al lui RAD6000. Acest procesor poate părea de mică putere prin comparație cu un procesor modern de PC, dar este extrem de rezistent și poate funcționa în spațiul extraterestru, afectat de explozii solare.[44] Sistemul de operare ce rulează pe acest calculator este VxWorks și are protocoale avansate de tratare a defecțiunilor și de monitorizare.[45]
Datele se stochează pe un modul de memorie de 160 Gb (20 GB) constând din 700 de cipuri de memorie, fiecare cu o capacitate de 256 Mbit. Această capacitate a memoriei nu este foarte mare, dat fiind volumul de date achiziționat; de exemplu, o singură imagine a camerei HiRISE poate ocupa până la 28 Gb.[45]
Determinarea altitudinii[modificare | modificare sursă]
Pentru a determina orbita navei și a facilita manevrele, sunt plasați șaisprezece senzori solari – opt principali și opt de rezervă – în jurul navei pentru a calibra direcția solară relativ la sistemul de referință al orbiterului. Două detectoare de stele, camere digitale utilizate pentru a cartografia poziția unor stele cunoscute, oferă NASA informații complete despre orientarea navei pe trei axe și altitudinea acesteia. O unitate de măsurare a inerției (MIMU) principală și una de rezervă, de la Honeywell, măsoară modificările altitudinii navei și modificările de factură negravitațională ale vitezei sale liniare. Fiecare MIMU este o combinație de trei accelerometre și trei giroscoape cu laser. Aceste sisteme sunt toate de importanță critică pentru MRO, întrucât acesta trebuie să fie capabil să își poziționeze camera cu foarte mare precizie pentru a realiza imaginile de înaltă calitate impuse de natura misiunii. Sistemul a fost proiectat și pentru a minimiza vibrațiile navei, pentru a permite instrumentelor să efectueze măsurători fără distorsiuni cauzate de vibrații.[46]
Sistemele de telecomunicații[modificare | modificare sursă]

Sistemul de telecomunicații al MRO este cel mai bun sistem de comunicații digitale trimis în spațiul îndepărtat până acum și primul care implementează turbocoduri. El constă dintr-o antenă foarte mare (3 metri), utilizată pentru a transmite date prin Deep Space Network pe frecvențe de bandă X la 8 GHz, și demonstrează utilizarea benzii Ka la 32 GHz pentru rate de transfer mari. Rata maximă de transfer de pe Marte este de maxim 6 Mbit/s, rată de zece ori mai mare decât a orbiterelor anterioare. Nava are două amplificatoare de 100 de wați în bandă X (din care unul este de rezervă), un amplificator de bandă Ka de 35 wați, și două transpondere.[2]
Antenele mai mici, cu amplificare redusă sunt prezente și pentru comunicații de viteză joasă în caz de urgențe sau evenimente speciale, cum ar fi lansarea și intrarea pe orbită. Aceste antene nu pot fi direcționate. Ele reprezintă un sistem de rezervă important, care asigură că MRO poate fi oricând contactat, chiar dacă antena principală este îndreptată în direcția opusă Pământului.[2]
Subsistemul de bandă Ka-band este utilizat în scop demonstrativ. Din cauza lipsei de spectru în banda X de 8,41 GHz, viitoarele misiuni în spațiul îndepărtat vor utiliza banda Ka de 32 GHz. Deep Space Network (DSN) a implementat capabilități de recepție în bandă Ka la toate cele trei complexe ale sale (Goldstone, Canberra și Madrid). Demonstrația de bandă Ka va arăta viabilitatea aceste benzi pentru operarea în spațiul îndepărtat. În faza de croazieră, date telemetrice au fost extrase prin banda Ka de 36 de ori cu aceste antene demonstrând funcționalitatea de recepție în banda Ka pentru toate antenele.
Propulsia și controlul altitudinii[modificare | modificare sursă]

Nava utilizează un rezervor de combustibil de 1.175 l cu 1.187 kg de hidrazină. Presiunea combustibilului este reglată prin adăugarea de heliu sub presiune dintr-un rezervor extern. Șaptezeci la sută din combustibil a fost utilizat la intrarea pe orbită.[47]
MRO are douăzeci de propulsoare la bord. Șase propulsoare mari produc fiecare câte 170 N pentru un total de 1.020 N necesari pentru intrarea pe orbită. Aceste motoare au fost inițial gândite pentru misiunea Mars Surveyor Lander din 2001. Șase propulsoare medii produc fiecare câte 22 N pentru manevrele de corecția traiectoriei și pentru controlul altitudinii în timpul intrării în orbită. Opt propulsoare mici produc câte 0,9 N pentru controlul altitudinii în timpul operării normale.[47]
Patru roți de reacție sunt utilizate pentru controlul precis al altitudinii în timpul activităților care necesită o platformă foarte stabilă, cum ar fi fotografierea cu înaltă rezoluție, în care chiar și cele mai mici mișcări pot face imaginile neclare. Fiecare roată este utilizată pentru o axă de mișcare și a patra este de rezervă. Fiecare dintre ele cântărește câte 10 kg și se poate roti până la 100 Hz sau 6.000 rpm.[47]
Descoperiri și fotografii[modificare | modificare sursă]
-
 Prăpastie în sistemul Kasei Valles, văzută de HiRISE.
Prăpastie în sistemul Kasei Valles, văzută de HiRISE. -
 Imagine mărită a stâncii din sistemul Kasei Valles din imaginea anterioară; se văd bolovanii şi urmele lor.
Imagine mărită a stâncii din sistemul Kasei Valles din imaginea anterioară; se văd bolovanii şi urmele lor. -
 Dunele Olympia Planitia, văzute HiRISE. S-a detectat gips în regiune.
Dunele Olympia Planitia, văzute HiRISE. S-a detectat gips în regiune. -
 Dune în craterul Wirtz cu cute şi îngheţ, văzute de HiRISE.
Dune în craterul Wirtz cu cute şi îngheţ, văzute de HiRISE. -
 Izvoare în craterul Vernal, văzute de HIRISE
Izvoare în craterul Vernal, văzute de HIRISE -
 Pete negre pe dune cauzate de explozii de gaze, văzute de HiRISE. Pot avea aproximativ 500 metri diametru şi un metru adâncime.
Pete negre pe dune cauzate de explozii de gaze, văzute de HiRISE. Pot avea aproximativ 500 metri diametru şi un metru adâncime. -
 Noi crater de impact format între martie 2000 şi iulie 2003. Bara scarei este de 500 de metri. Imagine HiRISE.
Noi crater de impact format între martie 2000 şi iulie 2003. Bara scarei este de 500 de metri. Imagine HiRISE. -
 Avalanşă marţiană şi căderi de praf şi pietre (HiRISE 2008)
Avalanşă marţiană şi căderi de praf şi pietre (HiRISE 2008) -
 19 februarie 2008: avalanşă marţiană fotografiată de Mars Reconnaissance Orbiter.
19 februarie 2008: avalanşă marţiană fotografiată de Mars Reconnaissance Orbiter. -
 Imagine mărită a avalanşei.
Imagine mărită a avalanşei. -
 Norii de praf se ridică peste o prăpastie de 700 m.
Norii de praf se ridică peste o prăpastie de 700 m. -
 Fotografie cu scară ce prezintă dimensiunile avalanşei.
Fotografie cu scară ce prezintă dimensiunile avalanşei. -
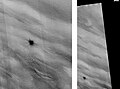
 Imagine cu Phoenix amartizând, văzută de HiRISE. Deşi pare că a aterizat în crater, locul aterizării este cu 20 km în faţa acestuia.
Imagine cu Phoenix amartizând, văzută de HiRISE. Deşi pare că a aterizat în crater, locul aterizării este cu 20 km în faţa acestuia. -
 Landerul Phoenix şi scutul său termic, văzute de HiRISE.
Landerul Phoenix şi scutul său termic, văzute de HiRISE. -
 Urmele lui Opportunity, văzute de HiRISE. Punctele albe sunt locurile în care roverul s-a oprit pentru a efectua observaţii ştiinţifice sau s-a întors.
Urmele lui Opportunity, văzute de HiRISE. Punctele albe sunt locurile în care roverul s-a oprit pentru a efectua observaţii ştiinţifice sau s-a întors. -
 Roverul Opportunity văzut de HiRISE la 29 ianuarie 2009. Opportunity este în drum spre craterul Endeavour, la 17 km de acest punct.
Roverul Opportunity văzut de HiRISE la 29 ianuarie 2009. Opportunity este în drum spre craterul Endeavour, la 17 km de acest punct.
















Relief inversat[modificare | modificare sursă]
Unele locuri de pe Marte prezintă relief inversat. În aceste locuri, o albie de râu poate fi un punct înălțat, în loc de o adâncitură. Fostele albii inversate ar putea fi formate de depunerile de pietre mari sau prin cimentare. În orice caz, factorii de eroziune au erodat terenul din jur și au lăsat vechea albie sub forma unei creste înălțate deoarece ea este mai rezistentă la eroziune. Imaginea de mai jos, realizată cu HiRISE, prezintă craterul Antoniadi cu creste sinuoase ce sunt fostele albii acum inversate.[48]
-
 Albii inversate în craterul Antoniadi, văzute de HiRISE.
Albii inversate în craterul Antoniadi, văzute de HiRISE.

Depuneri de cloruri[modificare | modificare sursă]
Utilizând date de la Mars Global surveyor, Mars Odyssey și de la Mars Reconnaissance Orbiter, oamenii de știință au găsit zăcăminte minerale de cloruri. Imaginea de mai jos prezintă zăcăminte din patrulaterul Phaethontis. Datele sugerează că aceste zăcăminte s-au format prin evaporarea apelor bogate în minerale. Cercetările arată că lacurile ar fi putut să fi fost împrăștiate pe arii extinse pe suprafața marțiană. De regulă, clorurile sunt ultimele minerale care ies dintr-o soluție. Carbonații, sulfații, și silicatele precipită înaintea lor. Roverele de pe Marte au găsit la suprafață sulfați și silicate. Locurile cu minereuri de cloruri ar fi putut să fi susținut diverse forme de viață. Mai mult, asemenea zone ar putea păstra urme fosile ale vieții.[49]
-
 Urme de apă în zăcămintele de cloruri din Phaethontis. Imagine HiRISE.
Urme de apă în zăcămintele de cloruri din Phaethontis. Imagine HiRISE.

Straturi[modificare | modificare sursă]
Numeroase locuri, cum ar fi craterul Columb de pe Marte, prezintă pietre așezate în straturi. Uneori, straturile au diferite culori. Pietrele deschise la culoare au fost asociate cu mineralele hidrurate, cum ar fi sulfații. Roverul Opportunity a examinat asemenea straturi îndeaproape cu diverse instrumente. Unele straturi sunt probabil compuse din particule fine deoarece ele par a se dezintegra într-un praf fin. Alte straturi se dezintegrează în bolovani mari și deci sunt, probabil, mult mai tari. Bazaltul, rocă vulcanică, se pare că există în straturile care formează bolovani. Bazaltul a fost identificat în numeroase puncte pe Marte. Instrumentele de pe nava din orbită au detectat lut (filosilicat) în unele straturi. Descoperirea de minerale hidrurate este una importantă deoarece ele se fornează doar în prezența apei.[50] Places that contain clays and/or other hydrated minerals would be good places to look for evidence of life.[51]
Pietrele pot forma straturi în mai multe feluri. Vulcanii, vânturile și apa pot produce straturi.[52]
-
 Craterul Becquerel, văzut de HiRISE.
Craterul Becquerel, văzut de HiRISE. -
 Straturi colorate deschis în Eos Chaos, văzute de HiRISE.
Straturi colorate deschis în Eos Chaos, văzute de HiRISE. -
 Straturi în craterul Columb, văzute de HiRISE. Această imagine în culori false are aproximativ 250 de metri lăţime. Unele straturi conţin minerale hidrurate.
Straturi în craterul Columb, văzute de HiRISE. Această imagine în culori false are aproximativ 250 de metri lăţime. Unele straturi conţin minerale hidrurate.



Note[modificare | modificare sursă]
- ^ a b Lyons, Daniel T. (). „Mars Reconnaissance Orbiter: Aerobraking Reference Trajectory” (PDF). AIAA/AAS Astrodynamics Specialist Conference and Exhibit. Arhivat din original (PDF) la . Accesat în .
- ^ a b c „"Spacecraft Parts: Telecommunications"”. NASA's MRO website. Arhivat din original la . Accesat în .
- ^ „NASA GOES BACK TO THE FUTURE WITH PLANS FOR A MARS ROVER IN 2003”. NASA. Arhivat din original la . Accesat în .
- ^ „NASA Unveils Plans for 21st Century Mars Campaign”. Space.com. Arhivat din originalul de la . Accesat în .
- ^ „NASA outlines Mars Missions”. Space.com. Arhivat din originalul de la . Accesat în .
- ^ „NASA Picks Lockheed Martin to Build 2005 Mars Craft”. Space.com. Arhivat din originalul de la . Accesat în .
- ^ „Moving Day For Mars Reconnaissance Orbiter”. Space.com. Accesat în .
- ^ Spaceflight Now | Delta Launch Report | Lander targets Mars' water
- ^ „Mars Reconnaissance Orbiter Overview”. Mars Reconnaissance Orbiter Website. Accesat în .
- ^ „Mission Timeline: Communications Relay”. Mars Reconnaissance Orbiter Website. Arhivat din original la . Accesat în .
- ^ „ILS To Launch Mars Reconnaissance Orbiter For NASA On Atlas V”. International Launch Services. Accesat în .
- ^ „NASA's Multipurpose Mars Mission Successfully Launched”. NASA Press Release from 12 august 2005. Accesat în .
- ^ „Mars Reconnaissance Orbiter: Multimedia”. Arhivat din original la . Accesat în .
- ^ „U.S. Spacecraft Enters Orbit Around Mars”. New York Times. . Accesat în .
- ^ „"Spaceflight Now" MRO Mission Status Center”. Accesat în .
- ^ „"New Mars Orbiter Ready for Action"”. Space.com. Accesat în .
- ^ „Mission Timeline: Aerobraking”. Mars Reconnaissance Orbiter: The Mission. Arhivat din original la . Accesat în .
- ^ „Mars Orbiter Successfully Makes Big Burn”. Accesat în .
- ^ „"Mars Reconnaissance Orbiter Reaches Planned Flight Path"”. JPL. Accesat în .
- ^ Mars orbiter looks down on rover
- ^ „Mars Climate Sounder Team Website - What We Do | The Planetary Society”. Arhivat din original la . Accesat în .
- ^ „Deterioration of the sharpest eyes on Mars has stopped - mars-rovers - 24 martie 2007 - New Scientist Space”. Arhivat din original la . Accesat în .
- ^ „Spacecraft Parts: Instruments”. Mars Reconnaissance Orbiter Website. Arhivat din original la . Accesat în februarie 2005.
- ^ „Stunning snaps from best camera ever sent to Mars”. Newscientist. Arhivat din original la . Accesat în .
- ^ "Google Earth FAQ" Google Earth Website.
- ^ „MRO HiRISE Camera Specifications”. HiRISE website. Accesat în .
- ^ „HiRISE: Instrument Development” (PDF). NASA Ames Research Center website. Accesat în . (PDF)
- ^ „Fact Sheet: HiRISE” (PDF). National Air and Space Museum. Arhivat din original (PDF) la . Accesat în . (PDF)
- ^ „HiRISE”. HiRISE website. Accesat în .
- ^ „MRO Context Imager (CTX) Instrument Description”. Malin Space Science Systems website. Accesat în .
- ^ „"Spacecraft Parts: Instruments: MARCI"”. MARCI website. Accesat în .
- ^ „CRISM Instrument Overview”. CRISM Instrument Website. Arhivat din original la . Accesat în .
- ^ „Spacecraft Parts: Instruments: MCS”. CRISM Instrument Website. Arhivat din original la . Accesat în .
- ^ NASA MRO web site (15 iulie 2008). SHARAD: MRO Spacecraft parts Arhivat în , la Wayback Machine.
- ^ KOMO-TV News Staff (12 august 2005). NASA Launches Mars Orbiter[nefuncțională]. KOMO-TV.
- ^ „Spacecraft Parts: Gravity Field Investigation Package”. Mars Reconnaissance Orbiter Website. Arhivat din original la . Accesat în .
- ^ „Spacecraft Parts: Electra”. Mars Reconnaissance Orbiter Website. Arhivat din original la . Accesat în februarie 2005.
- ^ „Spacecraft Parts: Optical Navigation Camera”. Mars Reconnaissance Orbiter Website. Arhivat din original la . Accesat în februarie 2005.
- ^ „Optical Navigation Demonstration Near Mars Multimedia Feature”. NASA Mars Reconnaissance Orbiter Website. Arhivat din original la . Accesat în martie 2006.
- ^ „"Rad 750"”. BAE Aerospace Parts. Accesat în .
- ^ NASA Authorization Act of 2004, S.2541 Arhivat în , la Wayback Machine.. thomas.loc.gov. URL accessed on 27 mai 2006)
- ^ „"Spacecraft Summary"”. NASA's MRO website. Arhivat din original la . Accesat în .
- ^ a b „"Spacecraft Parts: Electrical Power"”. NASA's MRO website. Arhivat din original la . Accesat în .
- ^ „"Rad 750"” (PDF). BAE aerospace parts. Arhivat din original (PDF) la . Accesat în .
- ^ a b „Spacecraft Parts: Command and Data-Handling Systems”. NASA's MRO website. Arhivat din original la . Accesat în .
- ^ „Spacecraft Parts: Guidance, Navigation, and Control Systems”. NASA's MRO website. Arhivat din original la . Accesat în .
- ^ a b c „Spacecraft Parts: Propulsion”. NASA's MRO website. Arhivat din original la . Accesat în .
- ^ HiRISE | Sinuous Ridges Near Aeolis Mensae
- ^ Osterloo, M. et.al. 2008. Chloride-Bearing Materials in the Southern Highlands of Mars. Science. 319:1651-1654
- ^ Target Zone: Nilosyrtis? | Mars Odyssey Mission THEMIS, themis.mars.asu.edu
- ^ htp://hirise.lpl.arizona.edu/PSP_004046_2080
- ^ HiRISE | High Resolution Imaging Science Experiment
Lectură suplimentară[modificare | modificare sursă]
- Mishkin, Andrew (). Sojourner : An Insider's View of the Mars Pathfinder Mission. New York: Berkeley Books. ISBN 0-425-19199-0.
- Squyres, Steve (). Roving Mars: Spirit, Opportunity, and the Exploration of the Red Planet. New York: Hyperion. ISBN 1-4013-0149-5.
- Read, Peter L. & Lewis, Steven L. (). The Martian Climate Revisited: Atmosphere and Environment of a Desert Planet. Berlin: Springer. ISBN 3-540-40743-X.
- Zubrin, Robert (). The Case for Mars. London: Pocket Books. ISBN 0-684-83550-9.
Legături externe[modificare | modificare sursă]
- Site-ul Mars Reconnaissance Orbiter de la NASA
- Site-ul Mars Reconnaissance Orbiter de la JPL
- Imagini de la Mars Reconnaissance Orbiter la JPL
- Catalogul de imagini HiRise. Laboratorul Lunar și Planetar de la Universitatea Arizona
- Aplicația JAVA CRISM pentru observații în timp real la Laboratorul de Fizică Aplicată al Universității Johns Hopkins
- Profilul misiunii Mars Reconnaissance Orbiter Arhivat în , la Wayback Machine. de la Explorările Sistemului Solar
- Simulare a traiectoriei de sosire a lui Mars Reconnaissance Orbiter
- HiBlog, blogul HiRISE. Conține informații despre MRO.
- Forme pe Marte - 12 fotografii de înaltă rezoluție de la HiRISE la www.time.com[nefuncțională]
.jpg)
.jpg)