sinusoida – wykres funkcji
y = sin x {\displaystyle y=\sin x} kosinusoida – wykres funkcji
y = cos x {\displaystyle y=\cos x} tangensoida – wykres funkcji
y = tg x {\displaystyle y=\operatorname {tg} x} Leonhard Euler (1707–1783) – szwajcarski matematyk, który udowodnił pewne własności funkcji trygonometrycznych, m.in. ich związek z funkcją wykładniczą [1] wzorem Eulera .Funkcje trygonometryczne – funkcje matematyczne wyrażające między innymi stosunki długości boków trójkąta prostokątnego zależnie od miary jego kątów wewnętrznych . Funkcje te wywodzą się z geometrii , konkretniej planimetrii , ale są rozważane także w oderwaniu od niej, dla różnych argumentów rzeczywistych i zespolonych [1] uogólnienie funkcji trygonometrycznych umożliwiła analiza matematyczna , w której opisano je szeregami potęgowymi [1] równaniach różniczkowych , innych równaniach funkcyjnych , iloczynach nieskończonych oraz ułamkach łańcuchowych , podane w dalszych sekcjach.
Do funkcji trygonometrycznych zalicza się przede wszystkim sinus , kosinus [a] tangens , a także kotangens, sekans, kosekans[a] [1] trygonometrii ; jej dział poświęcony tym funkcjom nazywano goniometrią [2] starożytności , a konkretniej starożytnej Grecji , po czym rozwijali ją uczeni indyjscy , islamscy [1] średniowiecznej Europy[3] nowożytnych podano dla tych funkcji:
Pierwotnie matematycy uważali wartości trygonometryczne za linie ciągłe połączone okręgami , jednak w XVIII wieku Leonhard Euler wprowadził współczesne pojęcie funkcji trygonometrycznych[4] tożsamości trygonometrycznych , które m.in. wiążą te funkcje ze sobą. Funkcje trygonometryczne zalicza się do elementarnych i stosuje w różnych działach matematyki jak geometria, analiza i teoria liczb . Korzystają z nich nauki ścisłe – zarówno przyrodnicze , społeczne , jak i techniczne . Jednym z powodów jest to, że funkcjami sinus i kosinus można modelować zjawiska okresowe jak drgania mechaniczne[1]
Istnieje kilka definicji funkcji trygonometrycznych, bazujących zarówno na pojęciach geometrycznych, jak i analitycznych.
Oznaczenia boków i kątów trójkąta prostokątnego użyte w definicji Funkcje trygonometryczne danego kąta ostrego w trójkącie prostokątnym definiuje się jako stosunek długości odpowiednich dwóch boków tego trójkąta:
Powyższe definicje można zebrać w postaci tabelki[12]
a ⋅ {\displaystyle {\tfrac {a}{\cdot }}} b ⋅ {\displaystyle {\tfrac {b}{\cdot }}} c ⋅ {\displaystyle {\tfrac {c}{\cdot }}} ⋅ a {\displaystyle {\tfrac {\cdot }{a}}} 1 {\displaystyle 1} ctg α {\displaystyle \operatorname {ctg} \alpha } cosec α {\displaystyle \operatorname {cosec} \alpha } ⋅ b {\displaystyle {\tfrac {\cdot }{b}}} tg α {\displaystyle \operatorname {tg} \alpha } 1 {\displaystyle 1} sec α {\displaystyle \sec \alpha } ⋅ c {\displaystyle {\tfrac {\cdot }{c}}} sin α {\displaystyle \sin \alpha } cos α {\displaystyle \cos \alpha } 1 {\displaystyle 1}
Do tej listy włączano też kilka innych funkcji; haversin upraszcza obliczanie odległości punktów na powierzchni Ziemi[13] [14] [15]
Przez okrąg jednostkowy i etymologia nazw [ edytuj | edytuj kod ] Definicja na okręgu jednostkowym Jeżeli wokół wierzchołka kąta poprowadzony zostanie okrąg o promieniu 1, czyli tzw. okrąg jednostkowy , to funkcje trygonometryczne miary kąta ostrego θ {\displaystyle \theta } [21]
sin θ = | A C | {\displaystyle \sin \theta =|AC|} cos θ = | O C | {\displaystyle \cos \theta =|OC|} tg θ = | A E | {\displaystyle \operatorname {tg} \theta =|AE|} ctg θ = | A F | {\displaystyle \operatorname {ctg} \theta =|AF|} sec θ = | O E | {\displaystyle \sec \theta =|OE|} cosec θ = | O F | {\displaystyle \operatorname {cosec} \theta =|OF|} Alternatywnie, jako argument funkcji trygonometrycznych zamiast długości łuku D A {\displaystyle DA} wycinka O B D A {\displaystyle OBDA} funkcji hiperbolicznych , gdzie argument funkcji definiowany jest jako pole wycinka hiperboli , analogicznego do O B D A {\displaystyle OBDA} [22]
Definicja ta była historycznie pierwsza. Wynikają z niej nazwy funkcji trygonometrycznych. Pierwotnie tymi nazwami określano właśnie długości odpowiednich odcinków, niekoniecznie na okręgu jednostkowym.
Sinus , czyli połowa długości cięciwy A B , {\displaystyle AB,} Aryabhaty w sanskrycie nazywany ardha-jiva („połowa cięciwy”), co zostało skrócone do jiva , a następnie transliterowane do arabskiego jiba (جب). Europejscy tłumacze, Robert z Chester i Gerardo z Cremony w XII-wiecznym Toledo pomylili jiba z jaib (جب), oznaczającym „zatokę” prawdopodobnie dlatego, że jiba (جب) i jaib (جب) są tak samo pisane po arabsku (informacja o samogłoskach jest gubiona w piśmie). Sinus znaczy po łacinie właśnie zatoka [23] Tangens pochodzi od łacińskiego tangere – dotykający , styczny , gdyż odcinek A E {\displaystyle AE} styczny do okręgu.Secans pochodzi z łacińskiego secare – dzielić , rozcinać , rozstrzygać i znaczy odcięcie . Pierwotnie nazwa odnosiła się do odcinka O E , {\displaystyle OE,} Cosinus , cotangens i cosecans powstały przez złożenie łacińskiego co- (wspólnik, towarzysz) i słów sinus, tangens i secans. Pierwotnie cosinus był nazywany complementi sinus , czyli sinus kąta dopełniającego . Rzeczywiście jest on równy sinusowi miary kąta dopełniającego ∠ A O F . {\displaystyle \angle AOF.} koti-jya , kojya ); trudno określić, w jakim stopniu nazwa łacińska do tego nawiązuje[24] Funkcja sinus i jej aproksymacje wielomianami stopnia 1 , 3 , 5 , 7 , 9 , 11 i 13 utworzonymi z początkowych wyrazów szeregu Taylora Definicje za pomocą szeregów Taylora określają wartości funkcji trygonometrycznych dla dowolnych liczb rzeczywistych , dla których da się je zdefiniować, pozwalają też na uogólnienie tych funkcji na zbiór liczb zespolonych , kwaternionów , macierzy , a nawet na algebry operatorów , przestrzenie unormowane czy pierścienie nilpotentne [25]
Zachodzą równości[26] [27] [28]
sin x = x − x 3 3 ! + x 5 5 ! − x 7 7 ! + … = = ∑ n = 0 ∞ ( − 1 ) n x 2 n + 1 ( 2 n + 1 ) ! , cos x = 1 − x 2 2 ! + x 4 4 ! − x 6 6 ! + … = = ∑ n = 0 ∞ ( − 1 ) n x 2 n ( 2 n ) ! , tg x = x + x 3 3 + 2 x 5 15 + … = = ∑ n = 1 ∞ B 2 n ( − 4 ) n ( 1 − 4 n ) ( 2 n ) ! x 2 n − 1 , | x | < π 2 , {\displaystyle {\begin{aligned}\sin x&=x-{\tfrac {x^{3}}{3!}}+{\tfrac {x^{5}}{5!}}-{\tfrac {x^{7}}{7!}}+\ldots =\\&=\sum _{n=0}^{\infty }(-1)^{n}{\tfrac {x^{2n+1}}{(2n+1)!}},\\\cos x&=1-{\tfrac {x^{2}}{2!}}+{\tfrac {x^{4}}{4!}}-{\tfrac {x^{6}}{6!}}+\ldots =\\&=\sum _{n=0}^{\infty }(-1)^{n}{\tfrac {x^{2n}}{(2n)!}},\\\operatorname {tg} x&=x+{\tfrac {x^{3}}{3}}+{\tfrac {2x^{5}}{15}}+\ldots =\\&=\sum _{n=1}^{\infty }{\tfrac {B_{2n}(-4)^{n}(1-4^{n})}{(2n)!}}x^{2n-1},\quad |x|<{\tfrac {\pi }{2}},\end{aligned}}} gdzie B n {\displaystyle B_{n}} liczby Bernoulliego ,
ctg x = 1 x − x 3 − x 3 45 − 2 x 5 945 − … = = ∑ n = 0 ∞ ( − 1 ) n 2 2 n B 2 n x 2 n − 1 ( 2 n ) ! , 0 < | x | < π , sec x = 1 + x 2 2 + 5 x 4 24 + 61 x 6 720 + … = = ∑ n = 0 ∞ ( − 1 ) n E 2 n ( 2 n ) ! x 2 n , | x | < π 2 , {\displaystyle {\begin{aligned}\operatorname {ctg} x&={\tfrac {1}{x}}-{\tfrac {x}{3}}-{\tfrac {x^{3}}{45}}-{\tfrac {2x^{5}}{945}}-\ldots =\\&=\sum _{n=0}^{\infty }{\tfrac {(-1)^{n}2^{2n}B_{2n}x^{2n-1}}{(2n)!}},\quad 0<|x|<\pi ,\\\sec x&=1+{\tfrac {x^{2}}{2}}+{\tfrac {5x^{4}}{24}}+{\tfrac {61x^{6}}{720}}+\ldots =\\&=\sum _{n=0}^{\infty }{\tfrac {(-1)^{n}E_{2n}}{(2n)!}}x^{2n},\quad |x|<{\tfrac {\pi }{2}},\end{aligned}}} gdzie E n {\displaystyle E_{n}} liczby Eulera ,
cosec x = 1 x + x 6 + 7 x 3 360 + 31 x 5 15120 + … = = ∑ n = 0 ∞ ( − 1 ) n + 1 2 ( 2 2 n − 1 − 1 ) B 2 n x 2 n − 1 ( 2 n ) ! , 0 < | x | < π . {\displaystyle {\begin{aligned}\operatorname {cosec} x&={\tfrac {1}{x}}+{\tfrac {x}{6}}+{\tfrac {7x^{3}}{360}}+{\tfrac {31x^{5}}{15120}}+\ldots =\\&=\sum _{n=0}^{\infty }{\tfrac {(-1)^{n+1}2(2^{2n-1}-1)B_{2n}x^{2n-1}}{(2n)!}},\quad 0<|x|<\pi .\end{aligned}}} Każdą z funkcji trygonometrycznych, na dowolnym przedziale zawierającym się w jej dziedzinie, można z dowolną dokładnością jednostajnie przybliżać wielomianami . W otoczeniu zera mogą do tego służyć początkowe wyrazy szeregu Taylora. Nie jest jednak możliwe jednostajne przybliżenie wielomianami funkcji trygonometrycznych w całej ich dziedzinie, jeśli dziedzina przybliżanej funkcji nie jest zbiorem liczb rzeczywistych R . {\displaystyle \mathbb {R} .}
Twierdzenie: Istnieje dokładnie jedna para funkcji rzeczywistych ( s , c ) {\displaystyle (s,c)} x , y ∈ R : {\displaystyle x,y\in \mathbb {R} {:}}
{ s ( x ) 2 + c ( x ) 2 = 1 s ( x + y ) = s ( x ) c ( y ) + c ( x ) s ( y ) c ( x + y ) = c ( x ) c ( y ) − s ( x ) s ( y ) 0 < x c ( x ) < s ( x ) < x d l a 0 < x < 1 {\displaystyle {\begin{cases}s(x)^{2}+c(x)^{2}=1\\[2pt]s(x+y)=s(x)c(y)+c(x)s(y)\\[2pt]c(x+y)=c(x)c(y)-s(x)s(y)\\[2pt]0<xc(x)<s(x)<x\ \mathrm {dla} \ 0<x<1\end{cases}}} Tymi funkcjami są[29]
s ( x ) = sin x , c ( x ) = cos x . {\displaystyle s(x)=\sin x,\quad c(x)=\cos x.} Funkcje trygonometryczne sinus i cosinus można zdefiniować[30] s ( x ) {\displaystyle s(x)} c ( x ) {\displaystyle c(x)}
{ s ( x 1 − x 2 ) = s ( x 1 ) c ( x 2 ) − c ( x 1 ) s ( x 2 ) c ( x 1 − x 2 ) = c ( x 1 ) c ( x 2 ) + s ( x 1 ) s ( x 2 ) lim x → 0 s ( x ) x = 1 {\displaystyle {\begin{cases}s(x_{1}-x_{2})=s(x_{1})c(x_{2})-c(x_{1})s(x_{2})\\[2pt]c(x_{1}-x_{2})=c(x_{1})c(x_{2})+s(x_{1})s(x_{2})\\[2pt]\lim _{x\to 0}{\tfrac {s(x)}{x}}=1\end{cases}}} Sinus i cosinus są rozwiązaniami szczególnymi równania różniczkowego
y ″ = − y , {\displaystyle y''=-y,} które opisuje m.in. ruch masy podwieszonej na sprężynie (tzw. oscylator harmoniczny , patrz Harmoniki
Sinus jest jedynym rozwiązaniem tego równania spełniającym warunki[31]
{ y ( 0 ) = 0 y ′ ( 0 ) = 1 {\displaystyle {\begin{cases}y(0)=0\\[2pt]y\,'(0)=1\end{cases}}} Cosinus natomiast jest jedynym rozwiązaniem, dla którego[31]
{ y ( 0 ) = 1 y ′ ( 0 ) = 0 {\displaystyle {\begin{cases}y(0)=1\\[2pt]y\,'(0)=0\end{cases}}} Funkcje trygonometryczne można też wprowadzić za pomocą iloczynów nieskończonych [32]
sin x = x ∏ n = 1 ∞ ( 1 − x 2 π 2 n 2 ) , {\displaystyle \sin x=x\prod _{n=1}^{\infty }\left(1-{\tfrac {x^{2}}{\pi ^{2}n^{2}}}\right),} cos x = ∏ n = 1 ∞ ( 1 − x 2 π 2 ( n − 1 2 ) 2 ) . {\displaystyle \cos x=\prod _{n=1}^{\infty }\left(1-{\tfrac {x^{2}}{\pi ^{2}(n-{\frac {1}{2}})^{2}}}\right).} Niektóre funkcje trygonometryczne można wyrazić w postaci ułamków łańcuchowych [33] [34] [35]
sin x = x 1 + x 2 ( 2 ⋅ 3 − x 2 ) + 2 ⋅ 3 x 2 ( 4 ⋅ 5 − x 2 ) + 4 ⋅ 5 x 2 ( 6 ⋅ 7 − x 2 ) + … , {\displaystyle \sin x={\cfrac {x}{1+{\cfrac {x^{2}}{(2\cdot 3-x^{2})+{\cfrac {2\cdot 3x^{2}}{(4\cdot 5-x^{2})+{\cfrac {4\cdot 5x^{2}}{(6\cdot 7-x^{2})+\ldots }}}}}}}},} tg x = x 1 − x 2 3 − x 2 5 − x 2 7 − … = 1 1 x − 1 3 x − 1 5 x − 1 7 x − … , {\displaystyle \operatorname {tg} x={\cfrac {x}{1-{\cfrac {x^{2}}{3-{\cfrac {x^{2}}{5-{\cfrac {x^{2}}{7-\ldots }}}}}}}}={\cfrac {1}{{\cfrac {1}{x}}-{\cfrac {1}{{\cfrac {3}{x}}-{\cfrac {1}{{\cfrac {5}{x}}-{\cfrac {1}{{\cfrac {7}{x}}-\ldots }}}}}}}},} ctg x = 1 x − x 3 − x 2 5 − x 2 7 − x 2 9 − … {\displaystyle \operatorname {ctg} x={\cfrac {1}{x}}-{\cfrac {x}{3-{\cfrac {x^{2}}{5-{\cfrac {x^{2}}{7-{\cfrac {x^{2}}{9-\ldots }}}}}}}}} Funkcje trygonometryczne można też zdefiniować analitycznie jako szczególne przypadki funkcji Bessela , funkcji Mathieu albo funkcji eliptycznych Jacobiego [36]
Własności w dziedzinie rzeczywistej [ edytuj | edytuj kod ] W matematyce na poziomie szkół średnich i w wielu praktycznych zastosowaniach rozpatruje się funkcje trygonometryczne dla argumentu będącego liczbą rzeczywistą . Mają one wówczas następujące własności:
Dziedzina i asymptoty Funkcje sinus i cosinus określone są dla każdej liczby rzeczywistej. Tangens jest określony w zbiorze powstałym ze zbioru wszystkich liczb rzeczywistych przez usunięcie liczb mających postać π 2 + k π , {\displaystyle {\tfrac {\pi }{2}}+k\pi ,} k {\displaystyle k} liczbą całkowitą . Cotangens jest określony w zbiorze wszystkich liczb rzeczywistych poza liczbami postaci k π , {\displaystyle k\pi ,} k {\displaystyle k} Tangens i secans mają asymptoty pionowe w punktach postaci x = π 2 + k π , {\displaystyle x={\tfrac {\pi }{2}}+k\pi ,} x = k π . {\displaystyle x=k\pi .} Przeciwdziedzina Sinus i cosinus są ograniczone : przyjmują wartości z przedziału [ − 1 , 1 ] . {\displaystyle [-1,1].} [37] ( − ∞ , − 1 ] ∪ [ 1 , ∞ ) . {\displaystyle (-\infty ,-1]\cup [1,\infty ).} Ekstrema Maksymalną wartość, dla obu funkcji 1 , {\displaystyle 1,} x = π 2 + 2 k π , {\displaystyle x={\tfrac {\pi }{2}}+2k\pi ,} x = 2 k π , {\displaystyle x=2k\pi ,} k {\displaystyle k} Minimalną wartość, dla obu funkcji − 1 , {\displaystyle -1,} x = − π 2 + 2 k π , {\displaystyle x=-{\tfrac {\pi }{2}}+2k\pi ,} x = π + 2 k π , {\displaystyle x=\pi +2k\pi ,} k {\displaystyle k} Miejsca zerowe Miejscami zerowymi sinusa i tangensa są punkty postaci x = k π , {\displaystyle x=k\pi ,} k {\displaystyle k} Miejscami zerowymi cosinusa i cotangensa są punkty postaci x = π 2 + k π , {\displaystyle x={\tfrac {\pi }{2}}+k\pi ,} k {\displaystyle k} Parzystość i nieparzystość Funkcje sinus, tangens, cotangens, cosecans są nieparzyste, a funkcje cosinus i secans parzyste: sin ( − x ) = − sin x cos ( − x ) = cos x tg ( − x ) = − tg x ctg ( − x ) = − ctg x sec ( − x ) = sec x cosec ( − x ) = − cosec x {\displaystyle {\begin{array}{l l}\sin(-x)=-\sin x&\cos(-x)=\cos x\\\operatorname {tg} (-x)=-\operatorname {tg} x&\operatorname {ctg} (-x)=-\operatorname {ctg} x\\\sec(-x)=\sec x&\operatorname {cosec} (-x)=-\operatorname {cosec} x\end{array}}} Okresowość Funkcje trygonometryczne są funkcjami okresowymi. Okresem podstawowym sinusa, cosinusa, secansa i cosecansa jest liczba 2 π , {\displaystyle 2\pi ,} π {\displaystyle \pi } [38] [39] sin x = sin ( x + 2 k π ) cos x = cos ( x + 2 k π ) tg x = tg ( x + k π ) ctg x = ctg ( x + k π ) sec x = sec ( x + 2 k π ) cosec x = cosec ( x + 2 k π ) {\displaystyle {\begin{array}{l l}\sin x=\sin(x+2k\pi )&\cos x=\cos(x+2k\pi )\\\operatorname {tg} x=\operatorname {tg} (x+k\pi )&\operatorname {ctg} x=\operatorname {ctg} (x+k\pi )\\\sec x=\sec(x+2k\pi )&\operatorname {cosec} x=\operatorname {cosec} (x+2k\pi )\end{array}}} gdzie k {\displaystyle k} Ciągłość i różniczkowalność Funkcje sinus i cosinus są ciągłe i różniczkowalne w każdym punkcie prostej rzeczywistej. Tangens, cotangens, secans i cosecans także są ciągłe i różniczkowalne w swoich dziedzinach (zob. wyżej). Odwracalność Własności algebraiczne Cosinusoida jest sinusoidą przesuniętą o wektor [ − π 2 , 0 ] . {\displaystyle \left[-{\tfrac {\pi }{2}},0\right].}
Sinusoida : wykres funkcji
y = sin x {\displaystyle y=\sin x} Cosinusoida : wykres funkcji
y = cos x {\displaystyle y=\cos x} Tangensoida : wykres funkcji
y = tg x {\displaystyle y=\operatorname {tg} x} Cotangensoida : wykres funkcji
y = ctg x {\displaystyle y=\operatorname {ctg} x} Wykres funkcji
secans y = sec x = 1 cos x {\displaystyle y=\sec x={\frac {1}{\cos x}}} Wykres funkcji
cosecans y = cosec x = 1 sin x {\displaystyle y=\operatorname {cosec} x={\frac {1}{\sin x}}}
Wartości funkcji trygonometrycznych dla kątów 0°, 15°, 30°, 45°, 60°, 75°, 90°, 180°[41]
radiany 0 {\displaystyle 0} π 12 {\displaystyle {\frac {\pi }{12}}} π 6 {\displaystyle {\frac {\pi }{6}}} π 4 {\displaystyle {\frac {\pi }{4}}} π 3 {\displaystyle {\frac {\pi }{3}}} 5 π 12 {\displaystyle {\frac {5\pi }{12}}} π 2 {\displaystyle {\frac {\pi }{2}}} π {\displaystyle \pi } stopnie 0 ∘ {\displaystyle 0^{\circ }} 15 ∘ {\displaystyle 15^{\circ }} 30 ∘ {\displaystyle 30^{\circ }} 45 ∘ {\displaystyle 45^{\circ }} 60 ∘ {\displaystyle 60^{\circ }} 75 ∘ {\displaystyle 75^{\circ }} 90 ∘ {\displaystyle 90^{\circ }} 180 ∘ {\displaystyle 180^{\circ }} sin {\displaystyle \sin } 0 {\displaystyle 0} 6 − 2 4 {\displaystyle {\tfrac {{\sqrt {6}}-{\sqrt {2}}}{4}}} 1 2 {\displaystyle {\tfrac {1}{2}}} 2 2 {\displaystyle {\tfrac {\sqrt {2}}{2}}} 3 2 {\displaystyle {\tfrac {\sqrt {3}}{2}}} 6 + 2 4 {\displaystyle {\tfrac {{\sqrt {6}}+{\sqrt {2}}}{4}}} 1 {\displaystyle 1} 0 {\displaystyle 0} cos {\displaystyle \cos } 1 {\displaystyle 1} 6 + 2 4 {\displaystyle {\tfrac {{\sqrt {6}}+{\sqrt {2}}}{4}}} 3 2 {\displaystyle {\tfrac {\sqrt {3}}{2}}} 2 2 {\displaystyle {\tfrac {\sqrt {2}}{2}}} 1 2 {\displaystyle {\tfrac {1}{2}}} 6 − 2 4 {\displaystyle {\tfrac {{\sqrt {6}}-{\sqrt {2}}}{4}}} 0 {\displaystyle 0} − 1 {\displaystyle -1} tg {\displaystyle \operatorname {tg} } 0 {\displaystyle 0} 2 − 3 {\displaystyle 2-{\sqrt {3}}} 3 3 {\displaystyle {\tfrac {\sqrt {3}}{3}}} 1 {\displaystyle 1} 3 {\displaystyle {\sqrt {3}}} 2 + 3 {\displaystyle 2+{\sqrt {3}}} nieokreślony 0 {\displaystyle 0} ctg {\displaystyle \operatorname {ctg} } nieokreślony 2 + 3 {\displaystyle 2+{\sqrt {3}}} 3 {\displaystyle {\sqrt {3}}} 1 {\displaystyle 1} 3 3 {\displaystyle {\tfrac {\sqrt {3}}{3}}} 2 − 3 {\displaystyle 2-{\sqrt {3}}} 0 {\displaystyle 0} nieokreślony sec {\displaystyle \sec } 1 {\displaystyle 1} 6 − 2 {\displaystyle {\sqrt {6}}-{\sqrt {2}}} 2 3 3 {\displaystyle {\tfrac {2{\sqrt {3}}}{3}}} 2 {\displaystyle {\sqrt {2}}} 2 {\displaystyle 2} 6 + 2 {\displaystyle {\sqrt {6}}+{\sqrt {2}}} nieokreślony − 1 {\displaystyle -1} cosec {\displaystyle \operatorname {cosec} } nieokreślony 6 + 2 {\displaystyle {\sqrt {6}}+{\sqrt {2}}} 2 {\displaystyle 2} 2 {\displaystyle {\sqrt {2}}} 2 3 3 {\displaystyle {\tfrac {2{\sqrt {3}}}{3}}} 6 − 2 {\displaystyle {\sqrt {6}}-{\sqrt {2}}} 1 {\displaystyle 1} nieokreślony
Wartości wszystkich funkcji trygonometrycznych dla argumentów postaci n π m , n ∈ Z , m ∈ N + {\displaystyle {\tfrac {n\pi }{m}},n\in \mathbb {Z} ,m\in \mathbb {N_{+}} } działań arytmetycznych i pierwiastka kwadratowego wtedy i tylko wtedy, gdy po skróceniu ułamka n m {\displaystyle {\tfrac {n}{m}}} m {\displaystyle m} potęgi dwójki i różnych liczb pierwszych Fermata (jak dotąd znanych jest pięć takich liczb: 3, 5, 17, 257, 65537)[42] [43] 1 ∘ = π 180 , {\displaystyle 1^{\circ }={\tfrac {\pi }{180}},} 180 = 2 2 ⋅ 3 2 ⋅ 5 {\displaystyle 180=2^{2}\cdot 3^{2}\cdot 5} m {\displaystyle m} m {\displaystyle m} twierdzenie Gaussa-Wantzela ).
Wzory redukcyjne pozwalają sprowadzić dowolny rzeczywisty argument funkcji trygonometrycznej do argumentu z przedziału [ 0 , π 2 ) , {\displaystyle [0,{\tfrac {\pi }{2}}),} [ 0 ∘ , 90 ∘ ) {\displaystyle [0^{\circ },90^{\circ })} [44]
I ćwiartka II ćwiartka III ćwiartka IV ćwiartka ϕ {\displaystyle \phi } 90 ∘ − α {\displaystyle 90^{\circ }-\alpha } 90 ∘ + α {\displaystyle 90^{\circ }+\alpha } 180 ∘ − α {\displaystyle 180^{\circ }-\alpha } 180 ∘ + α {\displaystyle 180^{\circ }+\alpha } 270 ∘ − α {\displaystyle 270^{\circ }-\alpha } 270 ∘ + α {\displaystyle 270^{\circ }+\alpha } 360 ∘ − α {\displaystyle 360^{\circ }-\alpha } π 2 − α {\displaystyle {\tfrac {\pi }{2}}-\alpha } π 2 + α {\displaystyle {\tfrac {\pi }{2}}+\alpha } π − α {\displaystyle \pi -\alpha } π + α {\displaystyle \pi +\alpha } 3 2 π − α {\displaystyle {\tfrac {3}{2}}\pi -\alpha } 3 2 π + α {\displaystyle {\tfrac {3}{2}}\pi +\alpha } 2 π − α {\displaystyle 2\pi -\alpha } sin ϕ {\displaystyle \sin \phi } cos α {\displaystyle \cos \alpha } cos α {\displaystyle \cos \alpha } sin α {\displaystyle \sin \alpha } − sin α {\displaystyle -\sin \alpha } − cos α {\displaystyle -\cos \alpha } − cos α {\displaystyle -\cos \alpha } − sin α {\displaystyle -\sin \alpha } cos ϕ {\displaystyle \cos \phi } sin α {\displaystyle \sin \alpha } − sin α {\displaystyle -\sin \alpha } − cos α {\displaystyle -\cos \alpha } − cos α {\displaystyle -\cos \alpha } − sin α {\displaystyle -\sin \alpha } sin α {\displaystyle \sin \alpha } cos α {\displaystyle \cos \alpha } tg ϕ {\displaystyle \operatorname {tg} \phi } ctg α {\displaystyle \operatorname {ctg} \alpha } − ctg α {\displaystyle -\operatorname {ctg} \alpha } − tg α {\displaystyle -\operatorname {tg} \alpha } tg α {\displaystyle \operatorname {tg} \alpha } ctg α {\displaystyle \operatorname {ctg} \alpha } − ctg α {\displaystyle -\operatorname {ctg} \alpha } − tg α {\displaystyle -\operatorname {tg} \alpha } ctg ϕ {\displaystyle \operatorname {ctg} \phi } tg α {\displaystyle \operatorname {tg} \alpha } − tg α {\displaystyle -\operatorname {tg} \alpha } − ctg α {\displaystyle -\operatorname {ctg} \alpha } ctg α {\displaystyle \operatorname {ctg} \alpha } tg α {\displaystyle \operatorname {tg} \alpha } − tg α {\displaystyle -\operatorname {tg} \alpha } − ctg α {\displaystyle -\operatorname {ctg} \alpha } sec ϕ {\displaystyle \sec \phi } cosec α {\displaystyle \operatorname {cosec} \alpha } − cosec α {\displaystyle -\operatorname {cosec} \alpha } − sec α {\displaystyle -\sec \alpha } − sec α {\displaystyle -\sec \alpha } − cosec α {\displaystyle -\operatorname {cosec} \alpha } cosec α {\displaystyle \operatorname {cosec} \alpha } sec α {\displaystyle \sec \alpha } cosec ϕ {\displaystyle \operatorname {cosec} \phi } sec α {\displaystyle \sec \alpha } sec α {\displaystyle \sec \alpha } cosec α {\displaystyle \operatorname {cosec} \alpha } − cosec α {\displaystyle -\operatorname {cosec} \alpha } − sec α {\displaystyle -\sec \alpha } − sec α {\displaystyle -\sec \alpha } − cosec α {\displaystyle -\operatorname {cosec} \alpha }
Aby zapamiętać zmianę funkcji, można wspomagać się następującą obserwacją: funkcja przechodzi w swoją kofunkcję , jeżeli rozpatrywany kąt ma postać 90 ∘ ± α {\displaystyle 90^{\circ }\pm \alpha } 270 ∘ ± α , {\displaystyle 270^{\circ }\pm \alpha ,} 0 ∘ ± α = 360 ∘ ± α {\displaystyle 0^{\circ }\pm \alpha =360^{\circ }\pm \alpha } 180 ∘ ± α {\displaystyle 180^{\circ }\pm \alpha } [37]
Ćwiartki układu współrzędnych I ćwiartka II ćwiartka III ćwiartka IV ćwiartka sin α {\displaystyle \sin \alpha } + + – – cos α {\displaystyle \cos \alpha } + – – + tg α {\displaystyle \operatorname {tg} \alpha } + – + – ctg α {\displaystyle \operatorname {ctg} \alpha } + – + – sec α {\displaystyle \sec \alpha } + – – + cosec α {\displaystyle \operatorname {cosec} \alpha } + + – –
Metodą mnemotechniczną zapamiętania znaków dla stosowanych najczęściej w redukcji pierwszych czterech spośród powyższych funkcji jest popularny wierszyk nieznanego autora:
W pierwszej ćwiartce są dodatnie ,w drugiej tylko sinus ,w trzeciej tangens i cotangens ,a w czwartej cosinus .W innych wersjach pierwszy wers brzmi:
W pierwszej ćwiartce same plusy lub W pierwszej wszystkie są dodatnie .Podstawowe tożsamości trygonometryczne [ edytuj | edytuj kod ] Związki między funkcjami trygonometrycznymi spełnione dla dowolnego argumentu ich dziedziny to tzw. tożsamości trygonometryczne . Są one prawdziwe zarówno w dziedzinie rzeczywistej, jak i zespolonej. Często używane są:
sin 2 α + cos 2 α = 1 {\displaystyle \sin ^{2}\alpha +\cos ^{2}\alpha =1} definicja tangensa i cotangensa za pomocą sinusa i cosinusa (pozwala wyprowadzić tożsamości dla tangensa i cotangensa z tożsamości dla sinusa i cosinusa)[45] tg α = sin α cos α , α ≠ π 2 + k π ctg α = cos α sin α , α ≠ k π , k ∈ Z . {\displaystyle {\begin{aligned}\operatorname {tg} \alpha &={\tfrac {\sin \alpha }{\cos \alpha }},\;\alpha \neq {\tfrac {\pi }{2}}+k\pi \\\operatorname {ctg} \alpha &={\tfrac {\cos \alpha }{\sin \alpha }},\;\alpha \neq k\pi \end{aligned}},\quad k\in \mathbb {Z} .} Geometryczny dowód wzoru sin ( α + β ) = sin α ⋅ cos β + cos α ⋅ sin β {\displaystyle \sin(\alpha +\beta )=\sin \alpha \cdot \cos \beta +\cos \alpha \cdot \sin \beta } wzory na sinus i cosinus sumy i różnicy kątów[45] sin ( α ± β ) = sin α ⋅ cos β ± cos α ⋅ sin β {\displaystyle \sin(\alpha \pm \beta )=\sin \alpha \cdot \cos \beta \pm \cos \alpha \cdot \sin \beta } cos ( α ± β ) = cos α ⋅ cos β ∓ sin α ⋅ sin β {\displaystyle \cos(\alpha \pm \beta )=\cos \alpha \cdot \cos \beta \mp \sin \alpha \cdot \sin \beta } wzory na sumę i różnicę sinusów i cosinusów[45] sin α ± sin β = 2 sin α ± β 2 ⋅ cos α ∓ β 2 {\displaystyle \sin \alpha \pm \sin \beta =2\sin {\tfrac {\alpha \pm \beta }{2}}\cdot \cos {\tfrac {\alpha \mp \beta }{2}}} cos α + cos β = 2 cos α + β 2 ⋅ cos α − β 2 {\displaystyle \cos \alpha +\cos \beta =2\cos {\tfrac {\alpha +\beta }{2}}\cdot \cos {\tfrac {\alpha -\beta }{2}}} cos α − cos β = − 2 sin α + β 2 ⋅ sin α − β 2 {\displaystyle \cos \alpha -\cos \beta =-2\sin {\tfrac {\alpha +\beta }{2}}\cdot \sin {\tfrac {\alpha -\beta }{2}}} wzory na sinus i cosinus podwojonego argumentu[46] sin 2 α = 2 sin α ⋅ cos α {\displaystyle \sin 2\alpha =2\sin \alpha \cdot \cos \alpha } cos 2 α = cos 2 α − sin 2 α = 2 cos 2 α − 1 = 1 − 2 sin 2 α {\displaystyle \cos 2\alpha =\cos ^{2}\alpha -\sin ^{2}\alpha =2\cos ^{2}\alpha -1=1-2\sin ^{2}\alpha } wzory na sinus i cosinus połowy argumentu[47] | sin 1 2 α | = 1 − c o s α 2 {\displaystyle \left|\sin {\tfrac {1}{2}}\alpha \right|={\sqrt {\tfrac {1-cos\alpha }{2}}}} | cos 1 2 α | = 1 + c o s α 2 {\displaystyle \left|\cos {\tfrac {1}{2}}\alpha \right|={\sqrt {\tfrac {1+cos\alpha }{2}}}} iloczyn w postaci sumy[47] cos α ⋅ cos β = cos ( α − β ) + cos ( α + β ) 2 {\displaystyle \cos \alpha \cdot \cos \beta ={\tfrac {\cos(\alpha -\beta )+\cos(\alpha +\beta )}{2}}} sin α ⋅ sin β = cos ( α − β ) − cos ( α + β ) 2 {\displaystyle \sin \alpha \cdot \sin \beta ={\tfrac {\cos(\alpha -\beta )-\cos(\alpha +\beta )}{2}}} sin α ⋅ cos β = sin ( α − β ) + sin ( α + β ) 2 {\displaystyle \sin \alpha \cdot \cos \beta ={\tfrac {\sin(\alpha -\beta )+\sin(\alpha +\beta )}{2}}} wzory na wyrażanie jednych funkcji trygonometrycznych przez inne[45] [48] sin α = cos ( π 2 − α ) {\displaystyle \sin \alpha =\cos \left({\tfrac {\pi }{2}}-\alpha \right)} cos α = sin ( π 2 − α ) {\displaystyle \cos \alpha =\sin \left({\tfrac {\pi }{2}}-\alpha \right)} tg α = sin α cos α = ctg ( π 2 − α ) = 1 ctg α {\displaystyle \operatorname {tg} \alpha ={\tfrac {\sin \alpha }{\cos \alpha }}=\operatorname {ctg} \left({\tfrac {\pi }{2}}-\alpha \right)={\tfrac {1}{\operatorname {ctg} \alpha }}} ctg α = cos α sin α = tg ( π 2 − α ) = 1 tg α {\displaystyle \operatorname {ctg} \alpha ={\tfrac {\cos \alpha }{\sin \alpha }}=\operatorname {tg} \left({\tfrac {\pi }{2}}-\alpha \right)={\tfrac {1}{\operatorname {tg} \alpha }}} sec α = 1 cos α = cosec ( π 2 − α ) {\displaystyle \sec \alpha ={\tfrac {1}{\cos \alpha }}=\operatorname {cosec} \left({\tfrac {\pi }{2}}-\alpha \right)} cosec α = 1 sin α = sec ( π 2 − α ) {\displaystyle \operatorname {cosec} \alpha ={\tfrac {1}{\sin \alpha }}=\sec \left({\tfrac {\pi }{2}}-\alpha \right)} sin 2 α = 1 − cos 2 α = tg 2 α 1 + tg 2 α = 1 1 + ctg 2 α 1 − sin 2 α = cos 2 α = 1 1 + tg 2 α = ctg 2 α 1 + ctg 2 α sin 2 α 1 − sin 2 α = 1 − cos 2 α cos 2 α = tg 2 α = 1 ctg 2 α 1 − sin 2 α sin 2 α = cos 2 α 1 − cos 2 α = 1 tg 2 α = ctg 2 α {\displaystyle {\begin{matrix}\color {red}{\sin ^{2}\alpha }=&1-\cos ^{2}\alpha =&{\tfrac {\operatorname {tg} ^{2}\alpha }{1+\operatorname {tg} ^{2}\alpha }}=&{\tfrac {1}{1+\operatorname {ctg} ^{2}\alpha }}\\1-\sin ^{2}\alpha =&\color {red}{\cos ^{2}\alpha }=&{\tfrac {1}{1+\operatorname {tg} ^{2}\alpha }}=&{\tfrac {\operatorname {ctg} ^{2}\alpha }{1+\operatorname {ctg} ^{2}\alpha }}\\{\tfrac {\sin ^{2}\alpha }{1-\sin ^{2}\alpha }}=&{\tfrac {1-\cos ^{2}\alpha }{\cos ^{2}\alpha }}=&\color {red}{\operatorname {tg} ^{2}\alpha }=&{\tfrac {1}{\operatorname {ctg} ^{2}\alpha }}\\{\tfrac {1-\sin ^{2}\alpha }{\sin ^{2}\alpha }}=&{\tfrac {\cos ^{2}\alpha }{1-\cos ^{2}\alpha }}=&{\tfrac {1}{\operatorname {tg} ^{2}\alpha }}=&\color {red}{\operatorname {ctg} ^{2}\alpha }\end{matrix}}} (Zastrzeżenie formalne: Równości powyżej są prawdziwe tylko dla argumentów, dla których wszystkie użyte funkcje są określone, a w mianownikach nie występują zera)
Pochodne funkcji trygonometrycznych [ edytuj | edytuj kod ] Zachodzą równości[49]
sin ′ x = cos x = sin ( π 2 + x ) {\displaystyle \sin 'x=\cos x=\sin \left({\tfrac {\pi }{2}}+x\right)} cos ′ x = − sin x = cos ( π 2 + x ) {\displaystyle \cos 'x=-\sin x=\cos \left({\tfrac {\pi }{2}}+x\right)} tg ′ x = 1 cos 2 x = sec 2 x = 1 + tg 2 x dla x ≠ π 2 + k π , k ∈ Z {\displaystyle \operatorname {tg} 'x={\tfrac {1}{\cos ^{2}x}}=\sec ^{2}x=1+\operatorname {tg} ^{2}x{\mbox{ dla }}x\neq {\tfrac {\pi }{2}}+k\pi ,k\in \mathbb {Z} } ctg ′ x = − 1 sin 2 x = − cosec 2 x = − ( 1 + ctg 2 x ) dla x ≠ k π , k ∈ Z {\displaystyle \operatorname {ctg} 'x=-{\tfrac {1}{\sin ^{2}x}}=-\operatorname {cosec} ^{2}x=-(1+\operatorname {ctg} ^{2}x){\mbox{ dla }}x\neq k\pi ,k\in \mathbb {Z} } sec ′ x = sin x cos 2 x = tg x sec x dla x ≠ π 2 + k π , k ∈ Z {\displaystyle \sec 'x={\tfrac {\sin x}{\cos ^{2}x}}=\operatorname {tg} x\sec x{\mbox{ dla }}x\neq {\tfrac {\pi }{2}}+k\pi ,k\in \mathbb {Z} } cosec ′ x = − cos x sin 2 x = − ctg x cosec x dla x ≠ k π , k ∈ Z {\displaystyle \operatorname {cosec} 'x=-{\tfrac {\cos x}{\sin ^{2}x}}=-\operatorname {ctg} x\operatorname {cosec} x{\mbox{ dla }}x\neq k\pi ,k\in \mathbb {Z} } Można z nich otrzymać pochodne wyższych rzędów:
sin ( n ) x = sin ( n π 2 + x ) = { sin x n = 4 k cos x n = 4 k + 1 − sin x n = 4 k + 2 − cos x n = 4 k + 3 dla k ∈ { 0 , 1 , 2 , … } , {\displaystyle \sin ^{(n)}x=\sin \left({\tfrac {n\pi }{2}}+x\right)={\begin{cases}\sin x&n=4k\\[2pt]\cos x&n=4k+1\\[2pt]-\sin x&n=4k+2\\[2pt]-\cos x&n=4k+3\end{cases}}{\mbox{ dla }}k\in \{0,1,2,\dots \},} cos ( n ) x = cos ( n π 2 + x ) = { cos x n = 4 k − sin x n = 4 k + 1 − cos x n = 4 k + 2 sin x n = 4 k + 3 dla k ∈ { 0 , 1 , 2 , … } . {\displaystyle \cos ^{(n)}x=\cos \left({\tfrac {n\pi }{2}}+x\right)={\begin{cases}\cos x&n=4k\\[2pt]-\sin x&n=4k+1\\[2pt]-\cos x&n=4k+2\\[2pt]\sin x&n=4k+3\end{cases}}{\mbox{ dla }}k\in \{0,1,2,\dots \}.} Wzory na n {\displaystyle n} [50] [51] [52] [53]
Całki funkcji trygonometrycznych [ edytuj | edytuj kod ] Podstawowe całki to[54]
∫ sin x d x = − cos x + C , {\displaystyle \int \sin x\mathrm {d} x=-\cos x+C,} ∫ cos x d x = sin x + C , {\displaystyle \int \cos x\mathrm {d} x=\sin x+C,} ∫ tg x d x = − ln | cos x | + C , {\displaystyle \int \operatorname {tg} x\mathrm {d} x=-\ln |\cos x|+C,} ∫ ctg x d x = ln | sin x | + C , {\displaystyle \int \operatorname {ctg} x\mathrm {d} x=\ln |\sin x|+C,} ∫ sec x d x = ln | sec x + tg x | + C , {\displaystyle \int \sec x\mathrm {d} x=\ln |\sec x+\operatorname {tg} x|+C,} ∫ cosec x d x = − ln | cosec x + ctg x | + C , {\displaystyle \int \operatorname {cosec} x\mathrm {d} x=-\ln |\operatorname {cosec} x+\operatorname {ctg} x|+C,} gdzie C ∈ R . {\displaystyle C\in \mathbb {R} .}
Każda całka funkcji wymiernej postaci R ( sin x , cos x ) {\displaystyle R(\sin x,\cos x)} obliczyć przez podstawienie [55]
t = tg x 2 , {\displaystyle t=\operatorname {tg} {\tfrac {x}{2}},} wówczas:
d x = 2 d t 1 + t 2 , {\displaystyle \operatorname {d} x={\tfrac {2\operatorname {d} t}{1+t^{2}}},} sin x = 2 t 1 + t 2 , {\displaystyle \sin x={\tfrac {2t}{1+t^{2}}},} cos x = 1 − t 2 1 + t 2 , {\displaystyle \cos x={\tfrac {1-t^{2}}{1+t^{2}}},} tg x = 2 t 1 − t 2 , {\displaystyle \operatorname {tg} x={\tfrac {2t}{1-t^{2}}},} ctg x = 1 − t 2 2 t , {\displaystyle \operatorname {ctg} x={\tfrac {1-t^{2}}{2t}},} sec x = 1 + t 2 1 − t 2 , {\displaystyle \sec x={\tfrac {1+t^{2}}{1-t^{2}}},} cosec x = 1 + t 2 2 t . {\displaystyle \operatorname {cosec} x={\tfrac {1+t^{2}}{2t}}.} Własności w dziedzinie zespolonej [ edytuj | edytuj kod ] Używając definicji analitycznych funkcji trygonometrycznych można te funkcje uogólnić m.in. na liczby zespolone.
Porównanie z funkcjami zmiennej rzeczywistej [ edytuj | edytuj kod ] Uogólnione w ten sposób funkcje trygonometryczne zachowują większość własności zmiennej rzeczywistej:
okresowość (w tym okres podstawowy),tożsamości trygonometryczne, miejsca zerowe ,punkty nieokreśloności: sinus i cosinus są określone w całym zbiorze liczb zespolonych, tangens jest określony w zbiorze liczb zespolonych, których usunięto liczby postaci ( 2 k − 1 ) π 2 , {\displaystyle {\tfrac {(2k-1)\pi }{2}},} k π , {\displaystyle k\pi ,} k {\displaystyle k} Zasadniczą różnicą jest brak ograniczoności funkcji sinus i cosinus. Przykładowo cosinus niezerowego argumentu urojonego jest zawsze liczbą rzeczywistą większą od 1 , {\displaystyle 1,}
cos i = 1 2 ( e − 1 + e ) ≈ 1,543 ; sin i = 1 2 i ( e − 1 − e ) ≈ 1,175 i {\displaystyle \cos i={\tfrac {1}{2}}(e^{-1}+e)\approx 1{,}543;\qquad \sin i={\tfrac {1}{2i}}(e^{-1}-e)\approx 1{,}175i} Funkcje trygonometryczne zmiennej zespolonej są (nieskończenie) wielokrotne na całej płaszczyźnie zespolonej.
Części rzeczywiste, urojone, moduły i argumenty [ edytuj | edytuj kod ] 



























































![{\displaystyle {\begin{cases}s(x)^{2}+c(x)^{2}=1\\[2pt]s(x+y)=s(x)c(y)+c(x)s(y)\\[2pt]c(x+y)=c(x)c(y)-s(x)s(y)\\[2pt]0<xc(x)<s(x)<x\ \mathrm {dla} \ 0<x<1\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e85d1245c98ed55a8af5aece10466d972a95d41)



![{\displaystyle {\begin{cases}s(x_{1}-x_{2})=s(x_{1})c(x_{2})-c(x_{1})s(x_{2})\\[2pt]c(x_{1}-x_{2})=c(x_{1})c(x_{2})+s(x_{1})s(x_{2})\\[2pt]\lim _{x\to 0}{\tfrac {s(x)}{x}}=1\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dfe1a18ead25b6a5bf2a28c6f32b6ac92201acc2)

![{\displaystyle {\begin{cases}y(0)=0\\[2pt]y\,'(0)=1\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/16813921748f6ec71b28a7f12ab8838419af6945)
![{\displaystyle {\begin{cases}y(0)=1\\[2pt]y\,'(0)=0\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1bef0fe0345ca1ff81f60cd36d710acf4f111726)










![{\displaystyle [-1,1].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4ca7e11ebbb9225cdba1609c129e46d0ec5101a0)
![{\displaystyle (-\infty ,-1]\cup [1,\infty ).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/666b957cb609454fa3f17cada4894f1ef12b3969)















![{\displaystyle \left[-{\tfrac {\pi }{2}},0\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/26e6eb16ecf7414a529554659430cdb443edb84d)
 Sinusoida: wykres funkcji
Sinusoida: wykres funkcji Cosinusoida: wykres funkcji
Cosinusoida: wykres funkcji

 Tangensoida: wykres funkcji
Tangensoida: wykres funkcji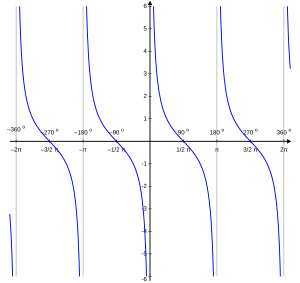 Cotangensoida: wykres funkcji
Cotangensoida: wykres funkcji

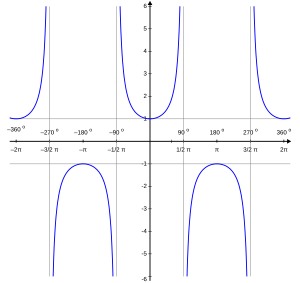 Wykres funkcji secans
Wykres funkcji secans Wykres funkcji cosecans
Wykres funkcji cosecans





































































































![{\displaystyle \sin ^{(n)}x=\sin \left({\tfrac {n\pi }{2}}+x\right)={\begin{cases}\sin x&n=4k\\[2pt]\cos x&n=4k+1\\[2pt]-\sin x&n=4k+2\\[2pt]-\cos x&n=4k+3\end{cases}}{\mbox{ dla }}k\in \{0,1,2,\dots \},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d45cc15a9d884d19503950b2d0c2df396219b258)
![{\displaystyle \cos ^{(n)}x=\cos \left({\tfrac {n\pi }{2}}+x\right)={\begin{cases}\cos x&n=4k\\[2pt]-\sin x&n=4k+1\\[2pt]-\cos x&n=4k+2\\[2pt]\sin x&n=4k+3\end{cases}}{\mbox{ dla }}k\in \{0,1,2,\dots \}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3b16bbd1cbd3daec6710e521bd90e45e04953868)
































